In our last installment, we discussed historical examples of automatons as well as the machines that started the robot revolution. As we progress past these, it becomes harder to decide which robots deserve a spot on this list.
Therefore, the machines in this installment were chosen based on outstanding contributions they made to the field of robotics. We’ll inevitably have to leave some innovative inventions off of our list, but we believe these are some of the most important machines you should know about.
1970 – WABOT-1 & WABOT-2
As technology gets more advanced, we’re edging closer to a world with robots that are indistinguishable from humans. Whether or not we’ll ever truly get to that stage is up for debate — if we do, WABOT-1 could be considered an ancestor of these machines.
Beginning in 1970, researchers at Waseda University in Japan began work on what would become the . Although it’s a little blocky for our modern standards, .
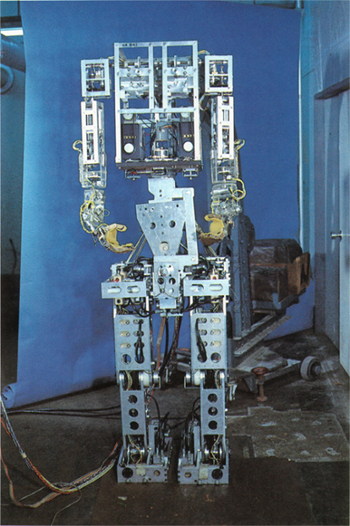
When completed in 1973, this robot had hands and limbs that could extend and grab objects as well as legs that could walk in a rudimentary fashion. WABOT-1 also had semi-functional ears, eyes, and a mouth. The robot was able to use these sensory devices to communicate with a person in Japanese as well as estimate distances. that this machine had the mental faculty of a one-and-a-half-year-old child.
That said, there’s a reason every home doesn’t have a WABOT-1. The machine required a lot of time to complete functions, such as the .
Building on this, the scientists that created WABOT-1 wanted to go a step further and create a robot capable of artistic endeavors. This culminated in 1980 with , a musical prodigy capable of playing the keys on an electric organ, reading sheet music, talking with a person, and even accompanying someone who is singing.
This machine is considered a big step away from robots simply being versatile tools and toward the realization of a “personal robot.”
1989 – Genghis
Genghis Khan, leader of the Mongol Empire and a man responsible for the , struck fear in the hearts of those in his way. The Genghis robot, , may also cause you to jump directly to fear — but you shouldn’t!
Inspired by various insects, the and a bug-like appearance that might spook you if you’ve got a fear of the creepy crawlies. But don’t fret! This machine had one of the most noble purposes a robot could ever achieve.

Brooks believed that space exploration would be much more attainable and effective if we sent out to explore rather than leaving the task to humans.
Brooks thought the key to this kind of space travel would be robots that could overcome obstacles based on simple, distributed controllers within the machine rather than a centralized control system. To achieve this, Brooks yanked out all the cognition processors originally in the Genghis prototype and only .
Unlike other robots, Genghis doesn’t really plan its movements. Instead, like a bug, Genghis moves a limb and uses its sensors to detect if there is an obstacle. If there is, the machine is able to recalculate its movement.
As if that weren’t cool enough, Genghis’s legs were .
While Genghis machines aren’t currently searching the solar system, this technology was a huge step forward for robotics and now resides at the Smithsonian Air and Space Museum.
1996 – P2
Although we’re skipping over the first and third robots of the P series — which were big achievements in their own right — the P2 machine created by Honda is such an exemplary example of the beauty of robots that it warrants this skip.
Many consider the P2 to be the first “.” Weighing in at 210 kilograms (462.97 pounds) with a height of 1.82 meters (5.97 feet) the P2 was basically human sized. One of the major advancements of the P2 system was that it was wireless, which gave it a greater degree of freedom. The P2 runs on a battery and has a wireless radio connection that allows users to make commands.

This machine could walk upstairs, push a cart, and achieve other human-like functions with relative ease. In fact, the robot could move at 2 km/h (1.24 mph.)
While that’s about , it’s important to remember how revolutionary this technology was. Remember how long it took WABOT-1 to move around? The P2 device could run circles around that machine, depending on your definition of “run.”
Check back with us next week as we look into the recent history of robotics, its present, and what the future has in store!
{kind=link}